CCD是Charge Coupled Device(電荷耦合器件)的縮寫,它是一種半導體成像器件。
CCD廣泛應用在數碼攝影、天文學,尤其是光學遙測技術、光學與頻譜望遠鏡和高速攝影技術,如Lucky
imaging。CCD在攝像機、數碼相機和掃描儀中應用廣泛,只不過攝像機中使用的是點陣CCD,即包括x、y兩個方向用于攝取平面圖像,而掃描儀中使用的是線性CCD,它只有x一個方向,y方向掃描由掃描儀的機械裝置來完成
激光器發射一個激光脈沖,并由計時器記錄下出射的時間,回返光經接收器接收,并由計時器記錄下回返的時間。兩個時間相減即得到了光的“飛行時間”,而光速是一定的,因此在已知速度和時間后很容易就可以計算出距離。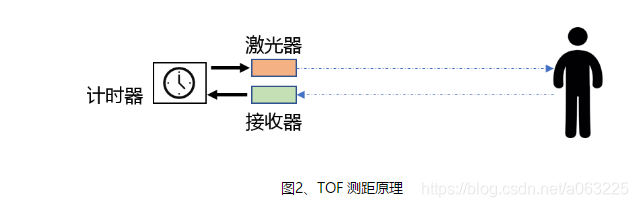
可惜的是,要是所有事情做起來都如同想起來一樣簡單,那世界就太美好了。這兩種方案在具體實現時都會有各自的挑戰,但是相比起來,TOF 要攻克的難關顯然要多得多。
TOF 雷達的實現難點主要在于:
首先是計時問題。在TOF 方案中,距離測量依賴于時間的測量。但是光速太快了,因此要獲得精確的距離,對計時系統的要求也就變得很高。一個數據是,激光雷達要測量1cm 的距離,對應的時間跨度約為65ps。稍微熟悉電氣特性的同學應該就知道這背后對電路系統意味著什么。
其次是脈沖信號的處理。這里面又分兩個部分:
a) 一個是激光的:三角雷達里對激光器驅動幾乎沒什么要求,因為測量依賴的激光回波的位置,所以只需要一個連續光出射就可以了。但是TOF 卻不行,不光要脈沖激光,而且質量還不能太差,目前TOF 雷達的出射光脈寬都在幾納秒左右,上升沿更是要求越快越好,因此每家產品的激光驅動方案也是有高低之分的。
b) 另一個是接收器的。一般來說回波時刻鑒別其實是對上升沿的時間鑒別,因此在對回波信號處理時,必須保證信號盡量不要失真。另外,即便信號沒有失真,由于回波信號不可能是一個理想的方波,因此在同一距離下對不同物體的測量也會導致前沿的變動。比如對同一位置的白紙和黑紙的測量,可能得到如下圖的兩個回波信號,而時間測量系統必須測出這兩個前沿是同一時刻的(因為距離是同一距離),這就需要特別的處理。
除此以外,接收端還面臨著信號飽和、底噪處理等等問題,可以說困難重重。
說了這么多,其實從下游用戶的角度,并不關心你實現起來簡單還是難。用戶最關心的不外乎兩點:性能和價格。先說性能,如果了解這個行業的人大多知道,TOF 雷達從性能上總體是優于三角雷達的。但是具體體現在哪些方面,背后的原因又是什么呢?
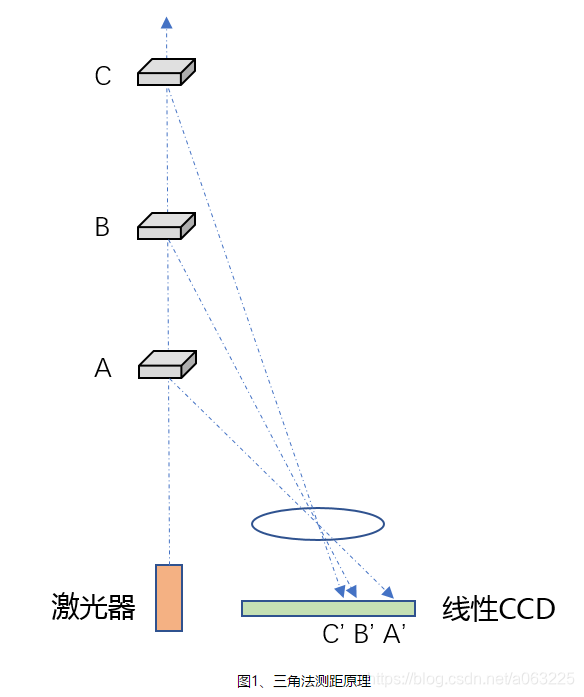
從原理上來說,TOF 雷達可以測量的距離更遠。實際上,在一些要求測量距離的場合,比如無人駕駛汽車應用,幾乎都是TOF 雷達。三角雷達測不遠,主要有幾個方面的原因:一是原理上的限制,其實仔細觀察圖1 不難發現,三角雷達測量的物體距離越遠,在CCD 上的位置差別就越小,以致于在超過某個距離后,CCD 幾乎無法分辨。二是三角雷達沒辦法像TOF 雷達那樣獲得較高的信噪比。TOF 激光雷達采用脈沖激光采樣,并且還能嚴格控制視場以減少環境光的影響。這些都是長距離測量的前提條件。
當然,距離長短并不代表絕對的好壞,這取決于具體的使用場景。
激光雷達描繪環境時,輸出的是點云圖像。每秒能夠完成的點云測量次數,
就是采樣率。在轉速一定的情況下,采樣率決定了每一幀圖像的點云數目以及點云的角分辨率。角分辨率越高,點云數量越多,則圖像對周圍環境的描繪就越細致。
就市面上的產品而言,三角法雷達的采樣率一般都在20k 以下,TOF 雷達則能做到更高。究其原因,TOF 完成一次測量只需要一個光脈沖,實時時間分析也能很快響應。但是三角雷達需要的運算過程耗時則更長。
激光雷達本質上是個測距設備,因此距離的測量精度是毫無疑問的核心指標。在這一點上,三角法在近距離下的精度很高,但是隨著距離越來越遠,其測量的精度會越來越差,這是因為三角法的測量和角度有關,而隨著距離增加,角度差異會越來越小。所以三角雷達在標注精度時往往都是采用百分比的標注(常見的如1%),那么在20m 的距離時最大誤差就在20cm。而TOF 雷達是依賴飛行時間,時間測量精度并不隨著長度增加有明顯變化,因此大多數TOF 雷達在幾十米的測量范圍內都能保持幾個厘米的精度。
在機械式雷達中,圖像幀率就是由電機的轉速決定的。就目前市面上的二維激光雷達而言,三角雷達的最高轉速通常在20Hz 以下,TOF 雷達則可以做到30Hz-50Hz 左右。通常三角雷達通常采用上下分體的結構,即上面轉的部分負責激光發射、接收和采集,下部分負責電機驅動和供電等,過重的運動組件限制了更高的轉速。而TOF 雷達通常采用一體化的半固態結構,電機僅需帶動反射鏡,因此電機的功耗很小,并且可以支持的轉速也更高。
當然,這里提到的轉速的區別只是對現有產品的一個客觀分析。其實轉速和雷達采用TOF 還是三角法沒有本質的聯系,主流的多線TOF 雷達也都是采用的上下分體的結構,畢竟同軸結構的光學設計受到許多限制。多線TOF 雷達的轉速一般也都在20Hz 以下。
不過,高轉速(或者說高幀率)對點云成像效果是很有意義的。高幀率更利于捕捉高速運動的物體,比如高速公路上行駛的車輛。此外,在自身建圖時,運動中的雷達建圖會發生畸變(舉個例子,如果一個靜止的雷達掃描一圈是一個圓,那么當雷達直線運動時,掃描出的圖像就變成一個橢圓)。顯然,高轉速可以更好的減少這種畸變的影響。