3、上升時間
帶寬指的是對單一正弦波的測量,如果需要測量的是方波,則需要考慮探頭的上升時間,該參數是探頭在階躍信號激勵的輸入下,輸出信號從10%上升至90%所需的時間。這個參數實際上是用來進行評估誤差范圍的。比如被測試方波信號的上升沿的上升時間為10ns,則經過一個上升時間為3.5ns的探頭,最終輸出的上升時間就大致為:

上升時間退化了5.9%。
如果此時改用0.7ns的探頭,則輸出的上升時間為:

上升時間僅僅退化了0.24%。所以測量時,就需要盡量選擇上升時間遠小于被測信號上升時間的探頭,一般需要3~5倍。
4、最大輸入電壓
最大輸入電壓是指探頭可以輸入的最大額定值的電壓。最大輸入電壓取決于探頭機身和探頭內部器件的額定擊穿電壓。一般該項會通過一些安規規范來給出,而不是給出單一的電壓,比如一般10×的無源探頭的最大輸入電壓為300VRMS CAT Ⅱ。其中CAT Ⅱ 指的是一類測試場景,300VRMS CAT Ⅱ指的是在這類測試場景下可以測量的最大電壓。而且這個電壓并不是一個恒定值。而是會隨著頻率的變化而變化。一般探頭會給出自己的電壓額定曲線,如下圖所示:
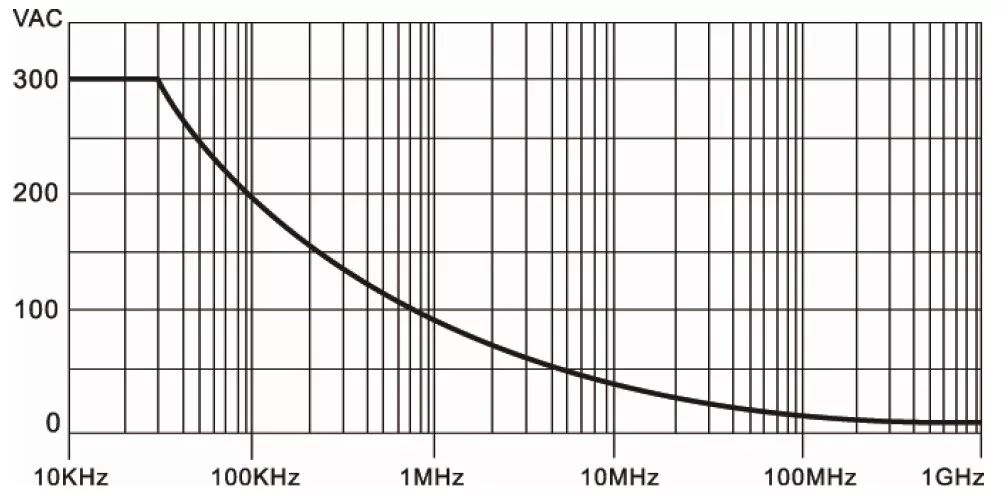
圖3
5、輸入電容
輸入電容就是從探頭的探頭頭部端測量出的電容。對于有源探頭,該電容包括探頭探針的寄生電容和探頭內部電路中的電容。對于一些無源探頭,還要包括探頭電纜的寄生電容和示波器本身的電容。該電容值越小,一般說明探頭可測量的頻率越高。
6、輸入電阻
探頭的輸入電阻是探頭的探頭頭部端測量出的電阻,該值是在DC情況下測量出來的。對于無源探頭來說,衰減比例越大,探頭的輸入電阻越高。
7、示波器補償范圍
多數無源探頭都是一種通用的設備,而在不同示波器之間,甚至在同一臺示波器不同通道之間都會有所差異。探頭為了兼容這些差異,就會自帶一個補償網絡,用來補償不同示波器間的差異。如果補償不足或者補償過度,就會導致測量結果出現錯誤。而這個補償網絡是一定會有一個能夠調整的范圍的,這個范圍就是示波器補償范圍。一般的無源探頭的示波器補償范圍為10~35pF。
8、電纜長度
每個探頭都必須有一段探頭電纜,這是為了更加方便的進行測量。而這段電纜會造成一定的信號傳播延時。例如,1m左右的探頭電纜,大概會有5ns的延時。對于10MHz的信號,這會造成大概20°左右的延時。電纜越長,會導致相位信號延遲越長。而這個延時一般情況下不會對測量造成影響,因為在一定帶寬范圍內,這個延時并不會跟隨信號頻率變化而變化,所以不會造成群延時的失真。只有在兩個以上通道一起測量時,傳輸延時才會產生影響,特別是當電壓探頭與電流探頭一起進行功率測量時,不同探頭之間的延時就會造成很大的影響。所以測量之前需要根據電纜長度來推算大致的延時。如果延時過大,則需要使用示波器內的延時校準功能。
常見探頭種類
常見探頭分類如下圖所示:

圖4 示波器探頭分類
其中無源探頭常見的有1×、10×、100×三種規格,一般情況下,1×探頭多為低帶寬探頭,適用于測量低頻低電壓的信號,100×探頭耐壓值一般較高,適用于一些高壓測量情景,而10×探頭的帶寬一般都比較高,適用于較高速信號的測量。
有源探頭中,高速差分探頭適用于高速信號的測量,其帶寬很高,而且探頭負載效益很小,但是一般都價格昂貴。高壓差分探頭一般適用于對高壓場合的測試,與無源探頭相比,不僅輸入電壓更高,一般都在1000V以上,而且由于其兩根測量線對地阻抗都非常高,使其可以直接進行非接地測量,比如在測量市電時,無源探頭的地線必須接到市電的地線上,只能測量L或者N與地線之間的電壓,而高壓差分探頭卻可以進行任意兩線間的測量。電流探頭用于對電流進行測量,有些電流探頭只能測量交流,有些也可以進行直流測量。