激光雷達按有無機械旋轉部件分類,包括機械激光雷達和固態激光雷達。機械激光雷達帶有控制激光發射角度的旋轉部件,而固態激光雷達則依靠電子部件來控制激光發射角度,無需機械旋轉部件。

機械激光雷達由光電二極管、MEMS反射鏡、激光發射接受裝置等組成,其中機械旋轉部件是指圖中可360°控制激光發射角度的MEMS發射鏡。
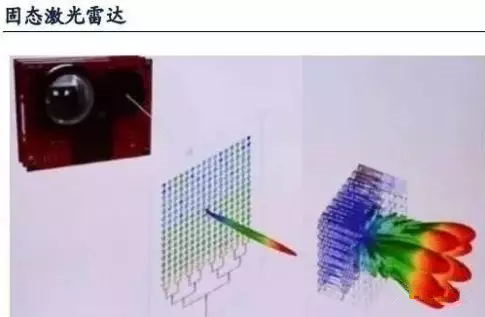
固態激光雷達與機械雷達不同,它通過光學相控陣列(OpticalPhasedArray)、光子集成電路(PhotonicIC)以及遠場輻射方向圖(FarFieldRadiationPattern)等電子部件代替機械旋轉部件實現發射激光角度的調整。
光學相控陣和微波相控陣是一個原理,利用的是光的相干干涉,出現了相位差,也就出現了干涉峰。所以如何讓通過器件后光產生相位差是研究的重點,這就需要找到合適的材料和激發方法。現在的激發方法主要是電光掃描,也就是通過加電使材料產生相位差。現在兩種比較熱,一個是光波導陣列,一個是MEMS器件的,MEMS器件這個優點是掃描的速度快,但是感覺不是那么必要,因為瓶頸還是在掃描角度這兒,所以現在MEMS原理的商業產品還沒有看到。
光波導陣列通過加電方式來實現光束掃描,利用光波導電光效應,對波導芯層加載電壓,使每個波導芯層具有不同的附加折射率,波束得以在波導陣元輸出截面光場具有不同的附加相位差,相位差按一定規律分布可引起輸出光速的偏轉。通過相位差按照一定規律分布輸出,從而實現光束的掃描。
固態激光雷達優勢:響應速度快,控制電壓低,掃描角度大,價格低。
由于內部結構有所差別,兩種激光雷達的體積大小也不盡相同。機械激光雷達體積較大、價格昂貴、測量精度相對較高,一般置于汽車外部。固態激光雷達尺寸較小、性價比較高、測量精度相對低一些,但可隱藏于汽車車體內,不會破壞外形美觀。

根據線束數量的多少,激光雷達又可分為單線束激光雷達與多線束激光雷達。
顧名思義,單線束激光雷達掃描一次只產生一條掃描線, 其所獲得的數據為2D數據,因此無法區別有關目標物體的3D信息。不過, 由于單線束激光雷達具有測量速度快、數據處理量少等特點, 多被應用于安全防護、地形測繪等領域。
傳統的激光雷達掃描視場非常小,如果想360度的觀察周圍,怎么辦?最自然的辦法就是多搞幾束激光,線數越多覆蓋的角度越大。

多線束激光雷達掃描一次可產生多條掃描線,目前市場上多線束產品包括4線束、8線束、16線束、32線束、64線束等,其細分可分為2.5D激光雷達及3D激光雷達。2.5D激光雷達與3D激光雷達最大的區別在于激光雷達垂直視野的范圍,前者垂直視野范圍一般不超過10°,而后者可達到30°甚至40°以上,這也就導致兩者對于激光雷達在汽車上的安裝位置要求有所不同。
測量距離、測量精度、測量速率、角度分辨率是決定三維激光雷達性能的幾個重要指標。

例如,在無人駕駛汽車這個應用領域,對激光雷達的探測距離是有要求的。比如說高速公路上要能夠檢測到前方車輛,還有在十字路口上,要能夠觀測馬路對面的汽車。
有趣的是,精度不是越高越好。激光雷達獲取的的數據可以進行障礙物識別、動態物體檢測及定位,如果精度太差就無法達到以上目的;但是,精度太好也有問題,高精度對激光雷達的硬件提出很大的要求,計算量會非常大,成本也會非常高。所以精度應該是適中就好。
還有一點不能忽視的是角分辨率,角分辨率決定打出去后的兩個激光點之間的距離。單點測距精度達到后,如果打到物體表面兩點間距離(點位)太遠,測距精度也就失去意義了。
機遇
激光雷達在智能機器生態系統中有很多機遇。與使用二維圖像相比,點云能夠更容易的被計算機使用,用于構建物理環境的三維形象——二維圖像是人腦最容易理解的數據,而對于計算機來說,點云是最容易理解的。
二維激光雷達掃描器可在戶外使用,并專為移動、低功耗應用而設計。它只用了競爭對手近四分之一的成本,這將給這類傳感器帶來全新的應用(我們在很多其他類型的傳感器中已經看到過這樣的現象)。 二維激光雷達也可以被搭載到另一個旋轉的元件上以產生環境中完整的三維點云。

其他公司正在尋求降低系統成本的其他策略,例如Quanergy的固態激光雷達。該系統大體與上文已介紹的系統相同,然而,與使用旋轉光學器件來移動光束不同的是,它們使用 “相控陣列光學系統”來引導激光脈沖的方向,它可以在某一方向上釋放一個激光脈沖,而讓下一個脈沖(1微秒之后)瞄準視野中的其它地方。
它能夠實時關注視野范圍內看似移動的物體,這是對人類駕駛員的模仿——后者能及時注意到即將進入汽車所行駛的道路的障礙物。Quanergy系統被設計為能在沒有機械移動的情況下做到這一點,并且每秒采樣大約100萬個數據點——這與64線旋轉激光雷達的速度相當,卻能顯著降低成本。它另一個優勢是更容易被集成在反光鏡和保險杠等其他汽車部件上。
另外,更大和功率更高的系統也正在開發中,它可以從在3萬英尺高度飛行的飛機上對地面成像,其分辨率足以能夠看到地面上的車輛。雖然這些系統的市場需求更小,且成本更高,但其發展將繼續降低傳感器技術的整體成本。
記者近日從西安理工大學獲悉,該校激光雷達科研團隊在斜程能見度測量技術上取得突破。他們提出了一種激光雷達結合輻射傳輸模式的方法,突破了目前的斜程能見度測量技術瓶頸,實現了精確測量。相關成果刊發在《光學學......
近日,北京首批自動駕駛環衛車在北京經濟技術開發區投入運營,這也是北京無人駕駛環衛車首次實現晝夜覆蓋的運營服務。2020年9月以來,本市以經開區為核心,啟動建設全球首個車路云一體化高級別自動駕駛示范區,......
美國眾議院中國事務特別委員會的議員敦促拜登政府調查中國激光雷達行業,并決定將哪些公司列入政府限制實體清單。激光雷達技術是一種遙感技術,被廣泛應用于自主系統和機器人技術,包括無人機和自動駕駛汽車。立法者......
掃臉入場、掃碼支付,無人駕駛、無線充電……“數字之城”給杭州帶來的,不僅是經濟的高質量發展,更是城市氣質的躍遷。賽場內外,記者采訪了不少外國來賓,細數本......
快科技7月11日消息,雖然目前幾乎所有汽車廠商都普及了智能駕駛、自動駕駛等技術,但如今只能作為“輔助駕駛”,并不能真正實現無人駕駛。即便是一些能夠達到無人駕駛技術的車輛,之前也必須配備一位司機當做安全......
5月24日,無人駕駛的俄羅斯航天局進步84號航天器從拜科努爾航天發射場發射,幾小時后與國際空間站的Poisk艙成功對接。該航天器為遠征69號機組人員運送了三噸物資。美國東部時間5月24日星期三中午12......
北京大學電子學院王興軍教授課題組-常林研究員課題組在兩年攻關的基礎上,研制出一種全新的硅基片上多通道混沌光源,提出了一種基于混沌光梳的并行激光雷達架構,攻克了激光雷達抗干擾和高精度并行探測這兩個世界性......
北京大學電子學院王興軍教授課題組-常林研究員課題組在兩年攻關的基礎上,研制出一種全新的硅基片上多通道混沌光源,提出了一種基于混沌光梳的并行激光雷達架構,攻克了激光雷達抗干擾和高精度并行探測這兩個世界性......
繼芯片之后,激光雷達成為汽車產業鏈的又一熱門詞匯。2月6日和7日,激光雷達企業速騰聚創先后對外宣布,獲得一汽豐田和賽力斯量產訂單。這是國產激光雷達首次進入以嚴格、精細著稱的豐田供應鏈體系。此前,頭部激......
本周,一家新的激光雷達巨頭正式誕生。當地時間2月13日,激光雷達制造商Ouster和Velodyne表示,雙方已經成功完成了“對等合并”(mergerofequals),此次合并于2月10日生效,公司......